Indice
Descrizione
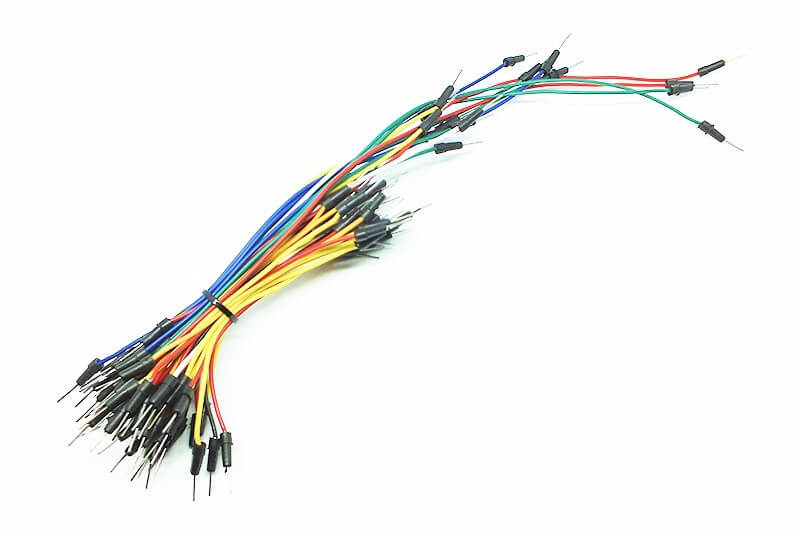
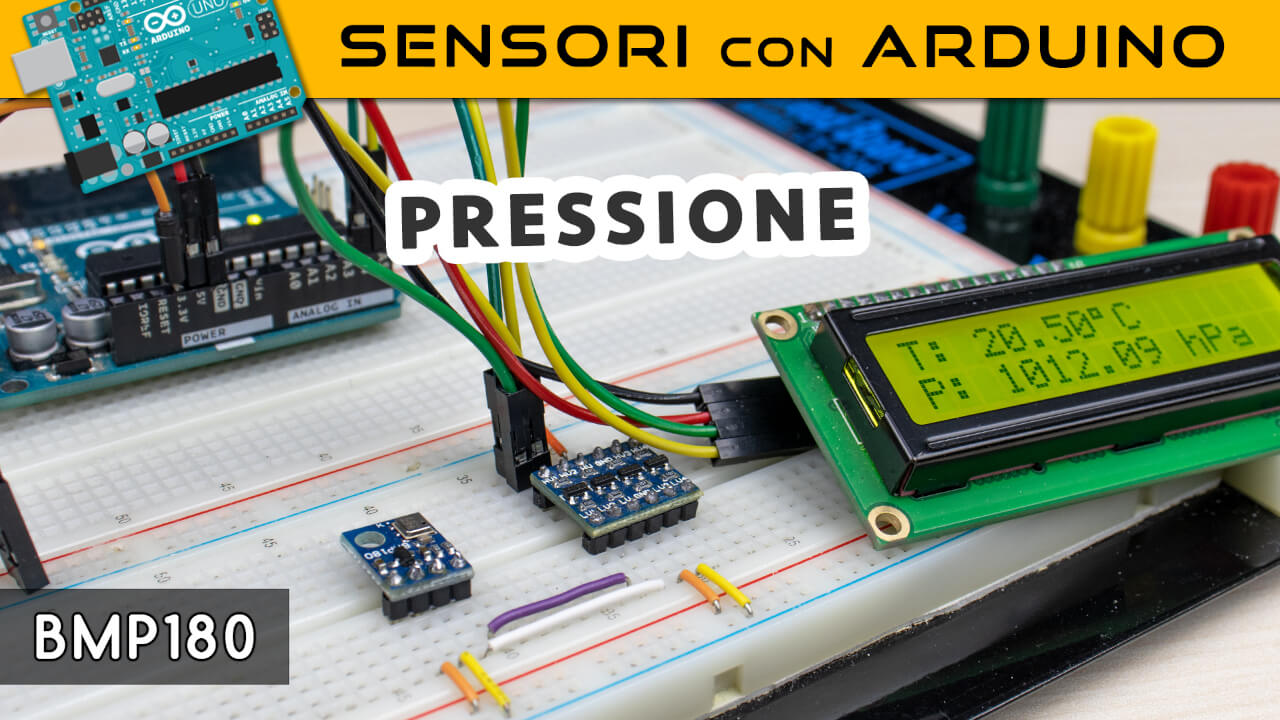
In questo episodio del tutorial di Arduino, impareremo a emulare la tastiera e il mouse. Realizzeremo alcuni semplici esempi di sketch e circuiti per trasformare la scheda di Arduino in un dispositivo di controllo del computer. Utilizzeremo dei pulsanti e il modulo joystick per inviare i caratteri al computer e muovere il cursore del mouse.
#include <Keyboard.h> int buttons[5] = {7, 6, 5, 4, 3}; void setup(){ Keyboard.begin(); for(int i = 0; i < 5; i++){ pinMode(buttons[i], INPUT); }} void loop(){ if(digitalRead(buttons[0]) == HIGH){ Keyboard.write('a'); delay(200); } if(digitalRead(buttons[1]) == HIGH){ Keyboard.println(" tutorial di arduino"); Keyboard.print("come emulare la tastiera con ..."); delay(200); } if(digitalRead(buttons[2]) == HIGH){ Keyboard.write(KEY_BACKSPACE); delay(200); } if(digitalRead(buttons[3]) == HIGH){ Keyboard.press(KEY_LEFT_CTRL); Keyboard.press('c'); delay(100); Keyboard.releaseAll(); delay(200); } if(digitalRead(buttons[4]) == HIGH){ Keyboard.press(KEY_LEFT_CTRL); Keyboard.press('v'); delay(100); Keyboard.releaseAll(); delay(200); } delay(10);}
#include <Mouse.h> #define JOYSTICK_X_PIN A0#define JOYSTICK_Y_PIN A1#define JOYSTICK_BUTTON_PIN 2 int buttons[5] = {7, 6, 5, 4, 3};bool enable = false;int wheelDirection = 0; void setup(){ Mouse.begin(); for(int i = 0; i < 5; i++){ pinMode(buttons[i], INPUT); } pinMode(JOYSTICK_BUTTON_PIN, INPUT_PULLUP);} void loop(){ if(digitalRead(JOYSTICK_BUTTON_PIN) == LOW){ enable = !enable; delay(500); } if(enable){ if(digitalRead(buttons[0]) == HIGH){ Mouse.click(MOUSE_LEFT); delay(200); } if(digitalRead(buttons[1]) == HIGH){ Mouse.click(MOUSE_MIDDLE); delay(200); } if(digitalRead(buttons[2]) == HIGH){ Mouse.click(MOUSE_RIGHT); delay(200); } if(digitalRead(buttons[3]) == HIGH){ wheelDirection++; delay(200); } if(digitalRead(buttons[4]) == HIGH){ wheelDirection--; delay(200); } int xDelta = axisDelta(JOYSTICK_X_PIN); int yDelta = axisDelta(JOYSTICK_Y_PIN); Mouse.move(xDelta, yDelta, wheelDirection); wheelDirection = 0; } delay(10);} int axisDelta(int axisPin){ return (analogRead(axisPin)-512)/150;}
In qualità di Affiliato Amazon riceviamo un guadagno dagli acquisti idonei