Indice
Descrizione
In questo video tutorial, scoprirai come creare un sensore di parcheggio con Arduino. Questo progetto fai-da-te ti permette di evitare fastidiosi graffi e urti mentre parcheggi la tua auto.
Imparerai a costruire un sistema che utilizza ultrasuoni per rilevare la distanza tra il veicolo e gli ostacoli circostanti.
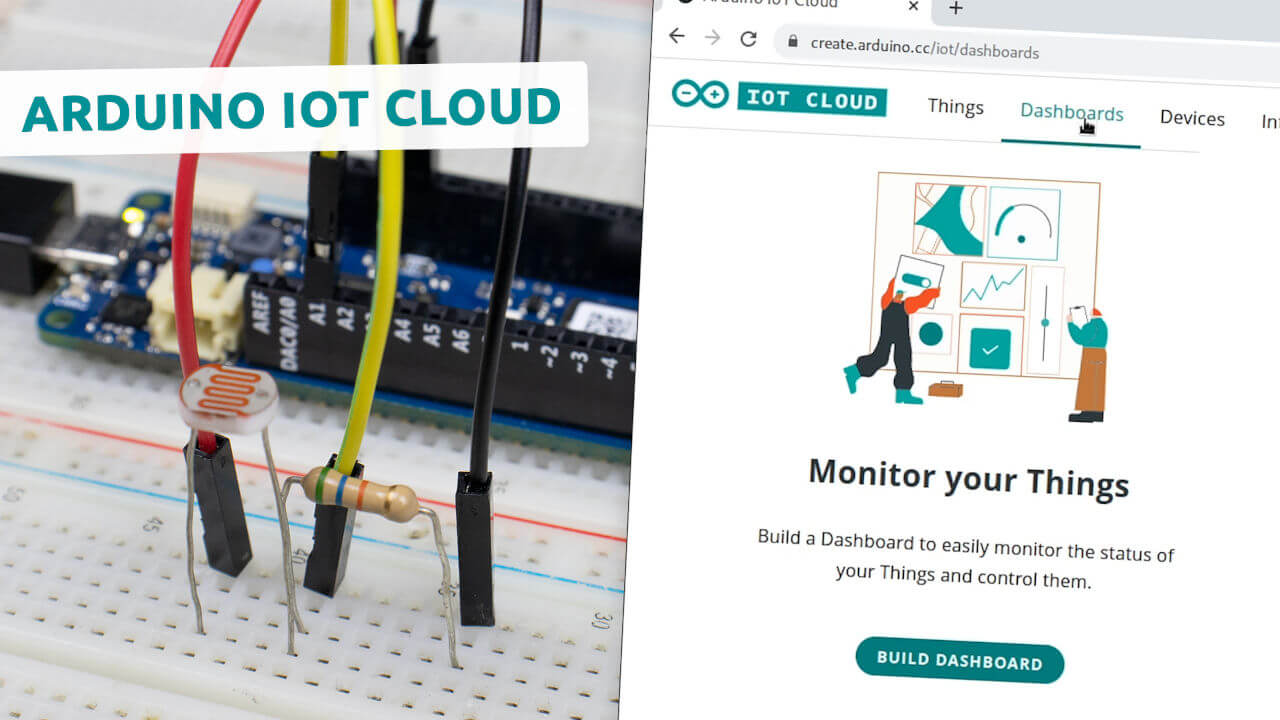
Inoltre, vedrai come collegarlo tramite WiFi ad Arduino IoT Cloud per un controllo comodo e facile da remoto.
#define TRIG_PIN 2#define ECHO_PIN 3#define TEMPERATURE_PIN A5#define BUZZER_PIN 5#define FREQUENCY 523#define LEVELS 3 int distances[] = {10, 20, 30};int leds[] = {8, 9, 10};unsigned long delays[] = {100, 150, 200};unsigned long durations[] = {80, 100, 120}; unsigned long lastChange = 0;int lastLevel = -1;int state = LOW; void setup() { pinMode(TRIG_PIN, OUTPUT); pinMode(ECHO_PIN, INPUT); pinMode(BUZZER_PIN, OUTPUT); for (int i = 0; i < LEVELS; i++) { pinMode(leds[i], OUTPUT); }} void loop() { float distance = readDistance(); int level = selectLevel(distance); if (level != lastLevel && lastLevel != -1) { noTone(BUZZER_PIN); digitalWrite(leds[lastLevel], LOW); state = LOW; } lastLevel = level; if (level == -1) { return; } if ((millis() - lastChange) > delays[level]) { state = !state; digitalWrite(leds[level], state); if (state) { tone(BUZZER_PIN, FREQUENCY, durations[level]); } lastChange = millis(); }} float readDistance() { float temperature = analogRead(TEMPERATURE_PIN) / 2.046; float speed = 0.03314 + 0.000062 * temperature; digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW); return pulseIn(ECHO_PIN, HIGH) * speed / 2;} int selectLevel(float distance) { for (int i = 0; i < LEVELS; i++) { if (distance < distances[i]) { return i; } } return -1;}#include "thingProperties.h" #define TRIG_PIN 2#define ECHO_PIN 3#define TEMPERATURE_PIN A5#define BUZZER_PIN 5#define FREQUENCY 523#define LEVELS 3#define ENABLE_LED_PIN 7 int distances[] = {10, 20, 30};int leds[] = {8, 9, 10};unsigned long delays[] = {100, 150, 200};unsigned long durations[] = {80, 100, 120}; unsigned long lastChange = 0;int lastLevel = -1;int state = LOW; void setup() { pinMode(TRIG_PIN, OUTPUT); pinMode(ECHO_PIN, INPUT); pinMode(BUZZER_PIN, OUTPUT); for (int i = 0; i < LEVELS; i++) { pinMode(leds[i], OUTPUT); } pinMode(ENABLE_LED_PIN, OUTPUT); // Defined in thingProperties.h initProperties(); // Connect to Arduino IoT Cloud ArduinoCloud.begin(ArduinoIoTPreferredConnection); enable = false;} void loop() { ArduinoCloud.update(); if (!enable) { return; } float distance = readDistance(); int level = selectLevel(distance); if (level != lastLevel && lastLevel != -1) { noTone(BUZZER_PIN); digitalWrite(leds[lastLevel], LOW); state = LOW; } lastLevel = level; if (level == -1) { return; } if ((millis() - lastChange) > delays[level]) { state = !state; digitalWrite(leds[level], state); if (state) { tone(BUZZER_PIN, FREQUENCY, durations[level]); } lastChange = millis(); }} float readDistance() { float temperature = analogRead(TEMPERATURE_PIN) / 2.046; float speed = 0.03314 + 0.000062 * temperature; digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW); return pulseIn(ECHO_PIN, HIGH) * speed / 2;} int selectLevel(float distance) { for (int i = 0; i < LEVELS; i++) { if (distance < distances[i]) { return i; } } return -1;} /* Since Enable is READ_WRITE variable, onEnableChange() is executed every time a new value is received from IoT Cloud.*/void onEnableChange() { digitalWrite(ENABLE_LED_PIN, enable); if (!enable && lastLevel != -1) { digitalWrite(leds[lastLevel], LOW); noTone(BUZZER_PIN); state = LOW; lastLevel = -1; }}In qualità di Affiliato Amazon riceviamo un guadagno dagli acquisti idonei